002_Normalization
1. 引入
1.1 为啥Norm?
由于在模型训练的时候往往层数较多,我个人尝试过,如果对输入和中间层不进行归一化操作,往往收敛效果比较差。但是我又在思考,在每模型结构的每层输出之后不都有一个非线性操作吗,很多都有类似缩放的操作,为什么还要进行Norm?于是我查阅了相关的原始论文,原来是因为:每层的激活输出会影响数据的分布情况,而进行Norm后的数据分布,在梯度计算的时候更容易进行收敛(这是结论,具体原因相关论文有指出,下面思考也进行了标注)。还有一点就能能够起到一定的正则化效果。
当然,我暂时对数据分布情况的了解和测试几乎为0,所以只能感受到一个大致的思想,后续再慢慢细磨也不迟,大方向没问题对我来说很重要。
这里引用一下RMS Norm作者的原话:
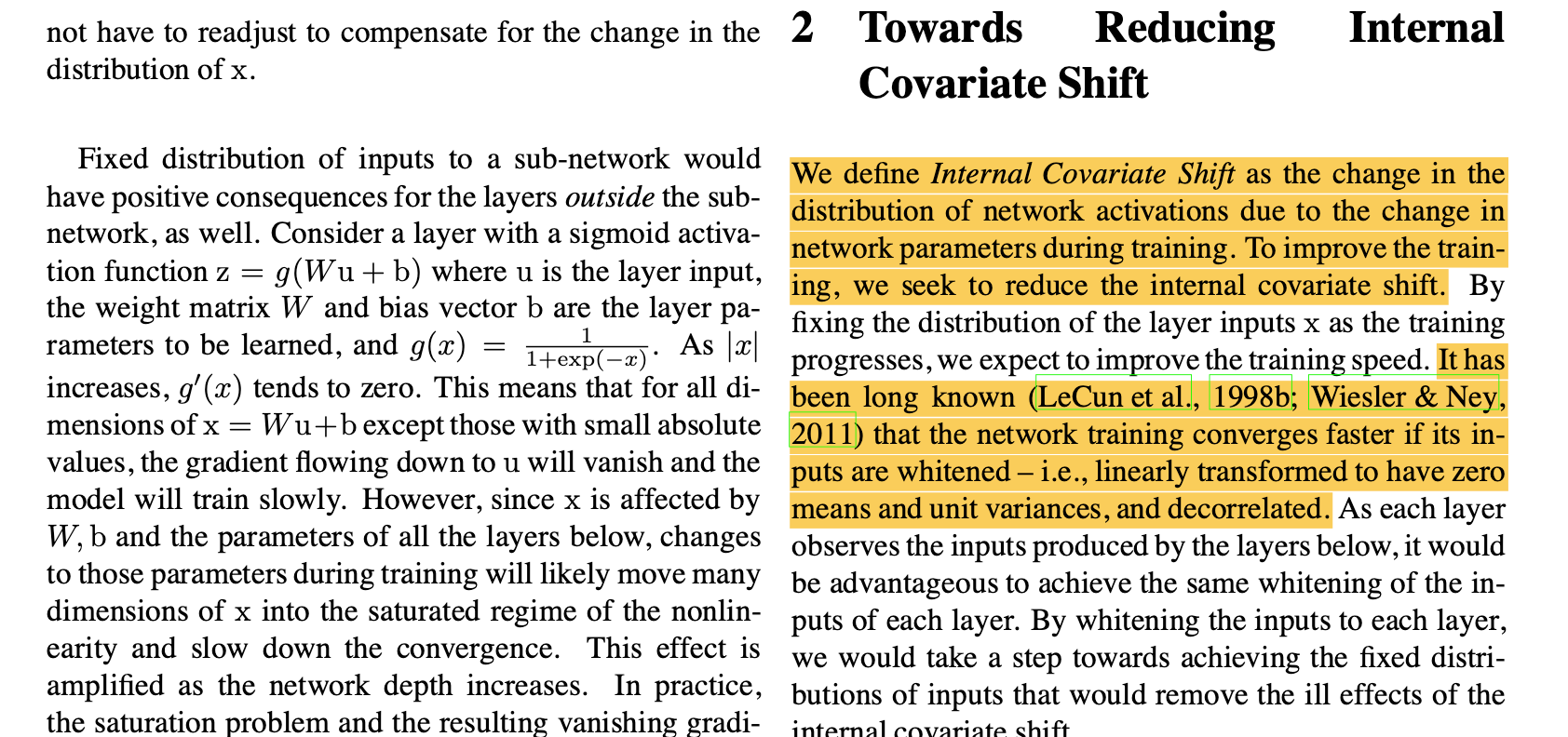
"One bottleneck deep neural networks have been hypothesized to suffer from is the internal covariate shift issue [27], where a layer’s input distribution changes as previous layers are updated, which significantly slows the training.1"
“深度神经网络被假设存在的一个瓶颈是 内部协变量偏移 问题 [27],其中层的输入分布随着先前层的更新而变化,这会显著减慢训练速度。1”
1.2 作用
解决多层神经网络中间层的协方差偏移(Internal Covariate Shift)
缓解梯度消失/爆炸(Gradient Vanishing/Explosion)
在LN论文里面好像有说明(也可能是在BN论文里面)
加速模型收敛
对权重初始化的依赖降低(AI说的)
想想权重初始化的方式有哪些?(论文支撑)
思考:
- 在NLP任务中,是在哪个维度进行Normalize?
- 都进行过Softmax操作了,为啥还需要进行Normalize?
2. 类型
| 类型 | 公式 | 特点/应用场景 |
|---|---|---|
| Batch Norm | 等长序列(cv) | |
| Layer Norm | 变长序列(nlp) | |
| RMS Norm | LN的一种优化 | |
| DyT | 暂定(2025最新论文) | |
| …… | …… | …… |
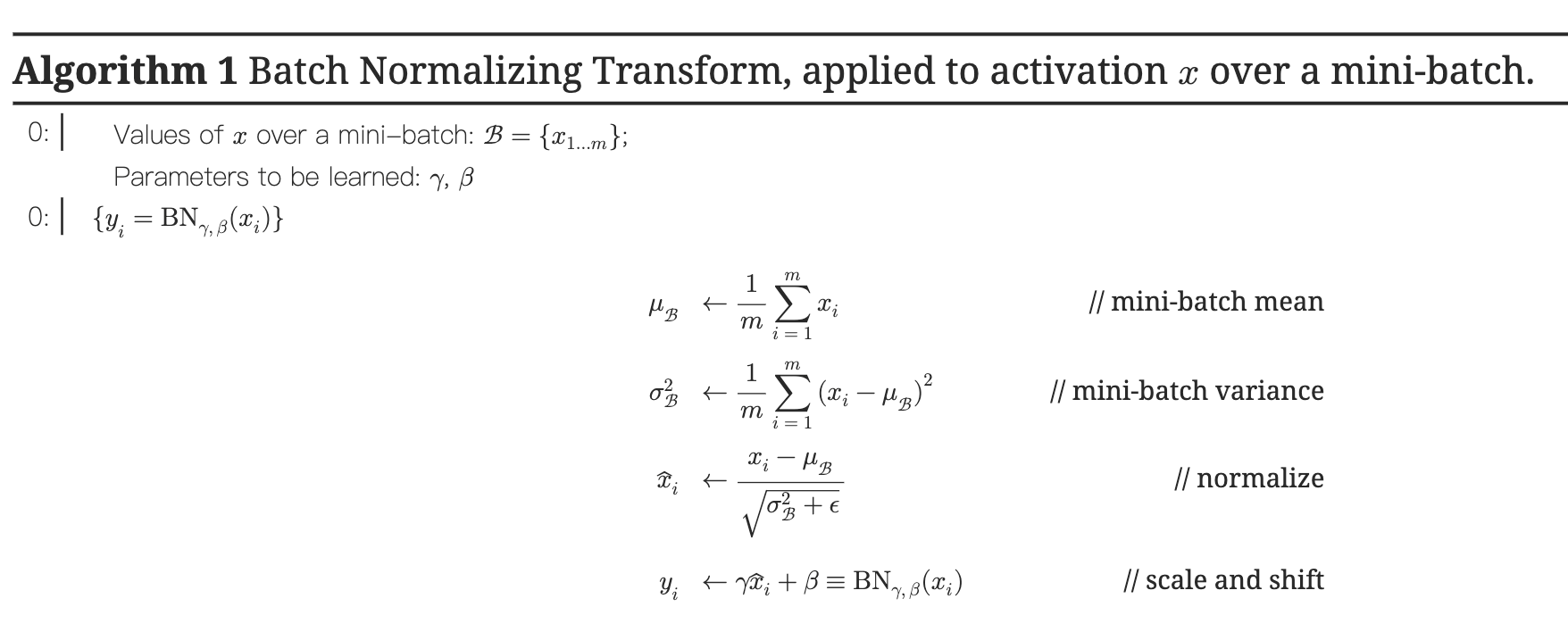
2.1 Batch Norm
中英文对比论文:Batch Norm
关键四步
训练和推理
NOTE
但是这里有一个点注意一下,在训练的时候有Batch的训练,但是推理的时候可以是任意的(比如单一的数据输入),这时候其实是没有Batch的mean(均值)和var(方差)这个概念的,所以,训练和推理的中Norm的计算方式是不一样的(PyTorch框架中的running属性进行控制),其实主要是两点(笔者个人理解):
训练中的mean和var用于推理中(想想该如何设计呢)
训练的mean计算采用移动指数平均的方式(代码里面有个momentum参数,这里的跟优化器里的动量不一样哈)
running_{mean}=(1−momentum)⋅running_{mean}+momentum⋅mean
var同理
pytorch相关关键代码
pythonif self.momentum is None: exponential_average_factor = 0.0 else: exponential_average_factor = self.momentum if self.training and self.track_running_stats: # TODO: if statement only here to tell the jit to skip emitting this when it is None if self.num_batches_tracked is not None: # type: ignore[has-type] self.num_batches_tracked.add_(1) # type: ignore[has-type] if self.momentum is None: # use cumulative moving average exponential_average_factor = 1.0 / float(self.num_batches_tracked) else: # use exponential moving average exponential_average_factor = self.momentum r""" Decide whether the mini-batch stats should be used for normalization rather than the buffers. Mini-batch stats are used in training mode, and in eval mode when buffers are None. """ if self.training: bn_training = True else: bn_training = (self.running_mean is None) and (self.running_var is None)
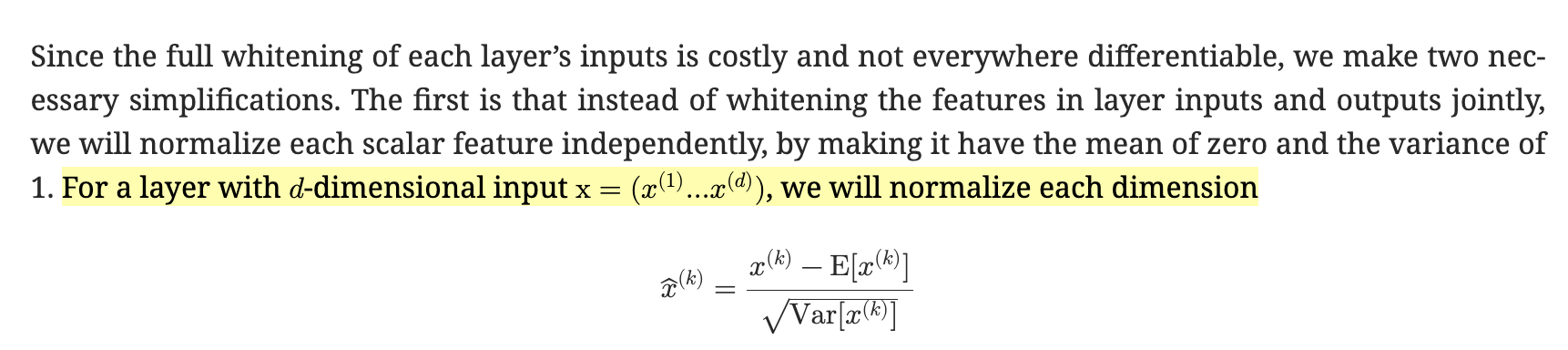
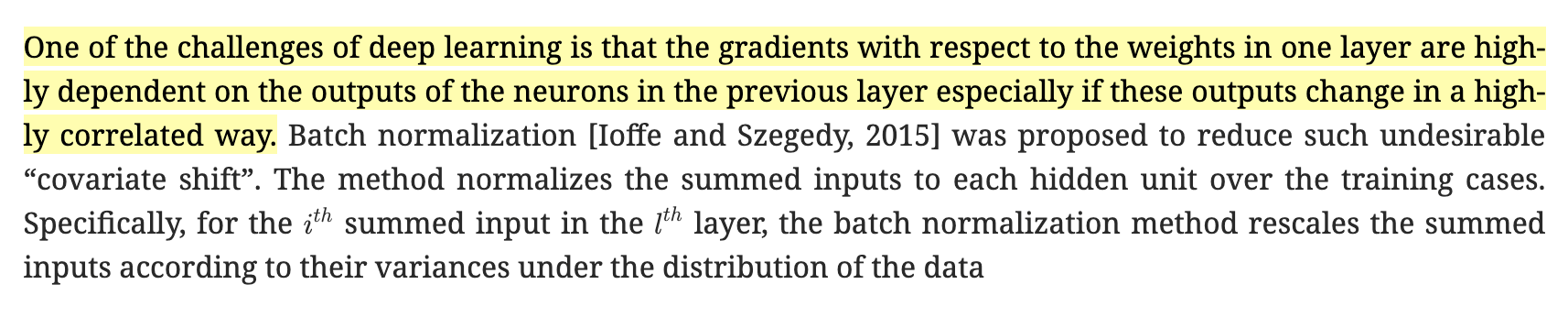
2.2 Layer Norm
中英文对照论文:Layer Norm
数据不变性:
这里引用一下PyTorch官网的
[!Note]:NOTE
Unlike Batch Normalization and Instance Normalization, which applies scalar scale and bias for each entire channel/plane with the
affineoption, Layer Normalization applies per-element scale and bias withelementwise_affine.
这里的affine就是最后那一步放射变化,简单说就是进行缩放和平移(偏执)那一步
- DeepSeek帮我稍微整理的:
| 归一化类型 | affine 的作用范围 | 参数形状(γ 和 β) | 适用场景 |
|---|---|---|---|
| BatchNorm | 整个通道/平面(per-channel) | (C,) | 固定长度的批次数据 |
| InstanceNorm | 整个通道/平面(per-channel) | (C,) | 图像生成/风格迁移 |
| LayerNorm | 每个元素(per-element) | 输入张量的最后一维 | 变长序列(如NLP/RNN) |
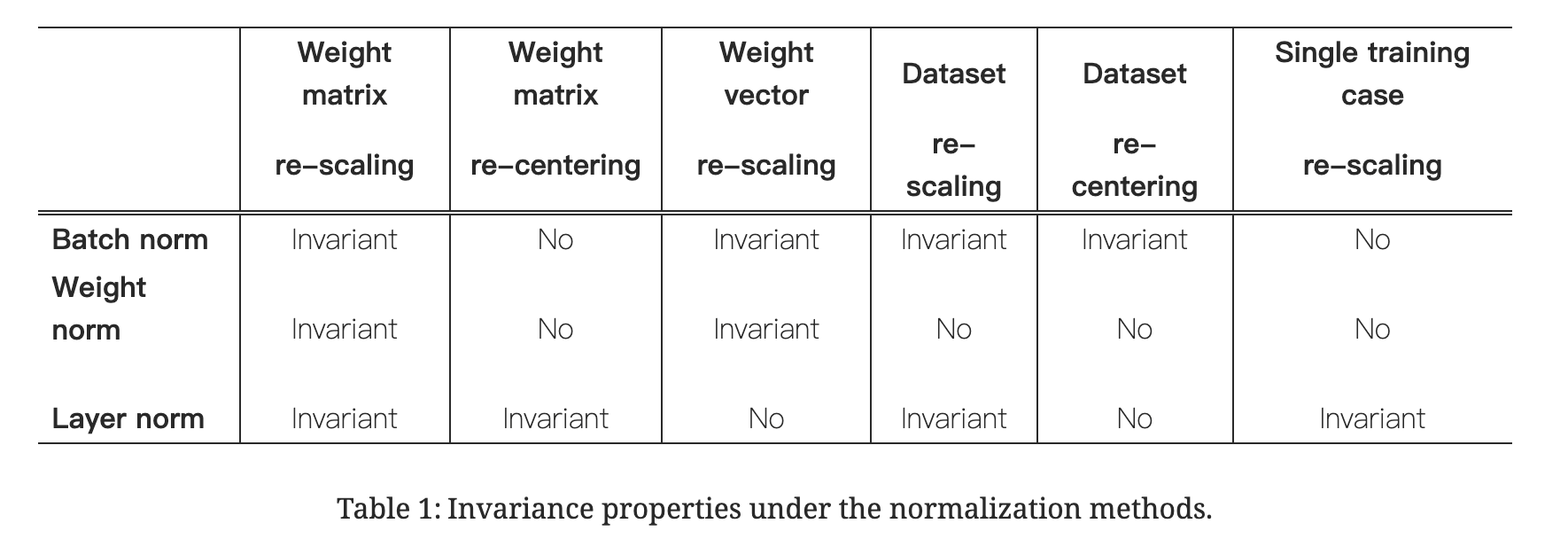
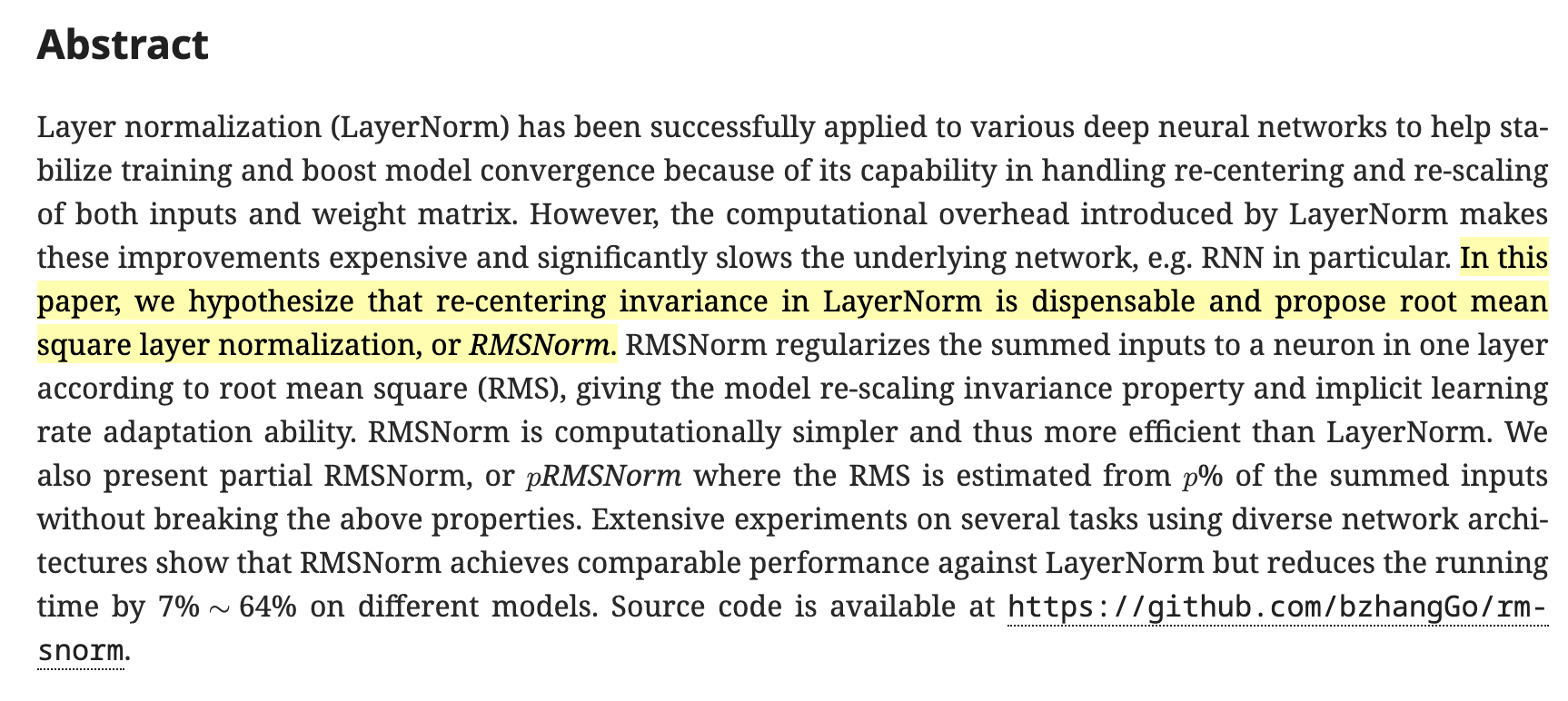
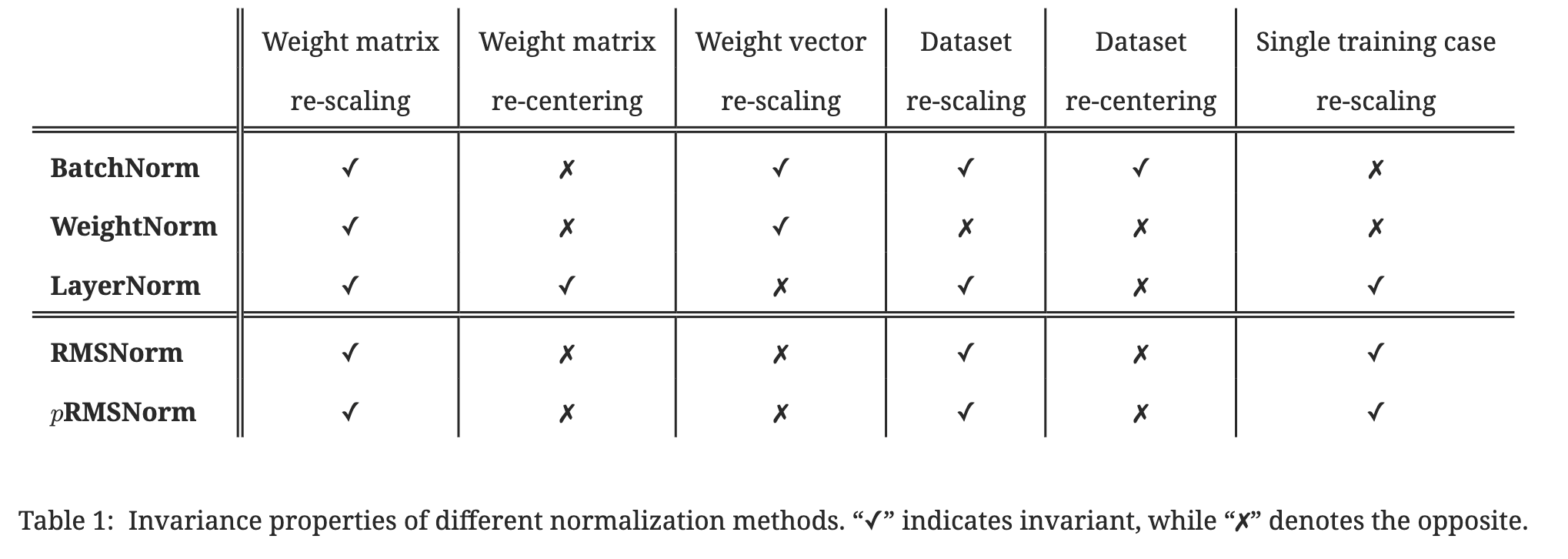
2.3 RMS Norm
中英文对照论文:RMS Norm
这种归一化是大模型常用的归一化层方式,原因很简单,高效!!!
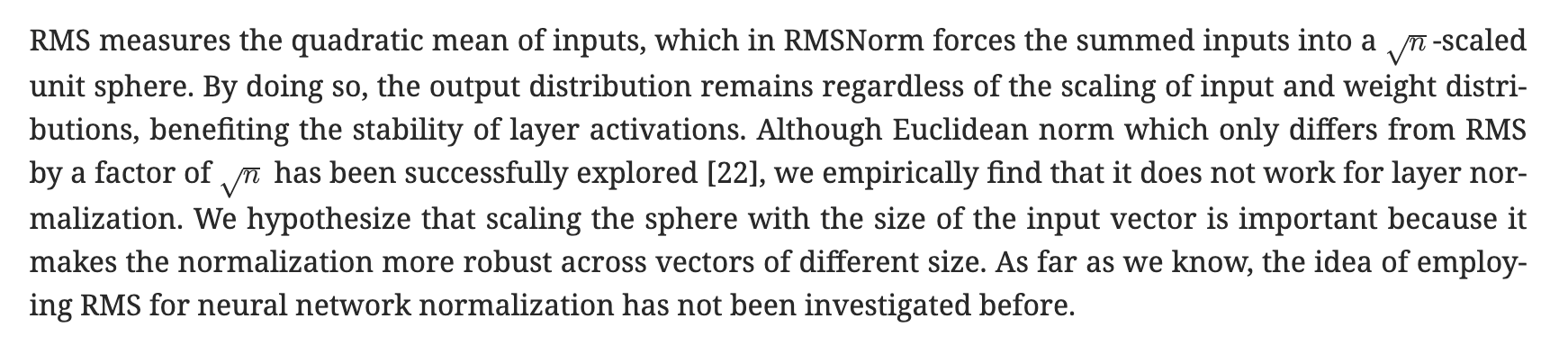
核心思想(笔者理解):去掉Layer Norm中的平移操作(平移不会影响相对分布),分母采用均方根代替。
原始论文作者是假设了重新计算的居中不变性(re-centering invariance)是可有可无的:
数据不变性:
思考:
为啥偏偏就选中MSE作为规范化标准?
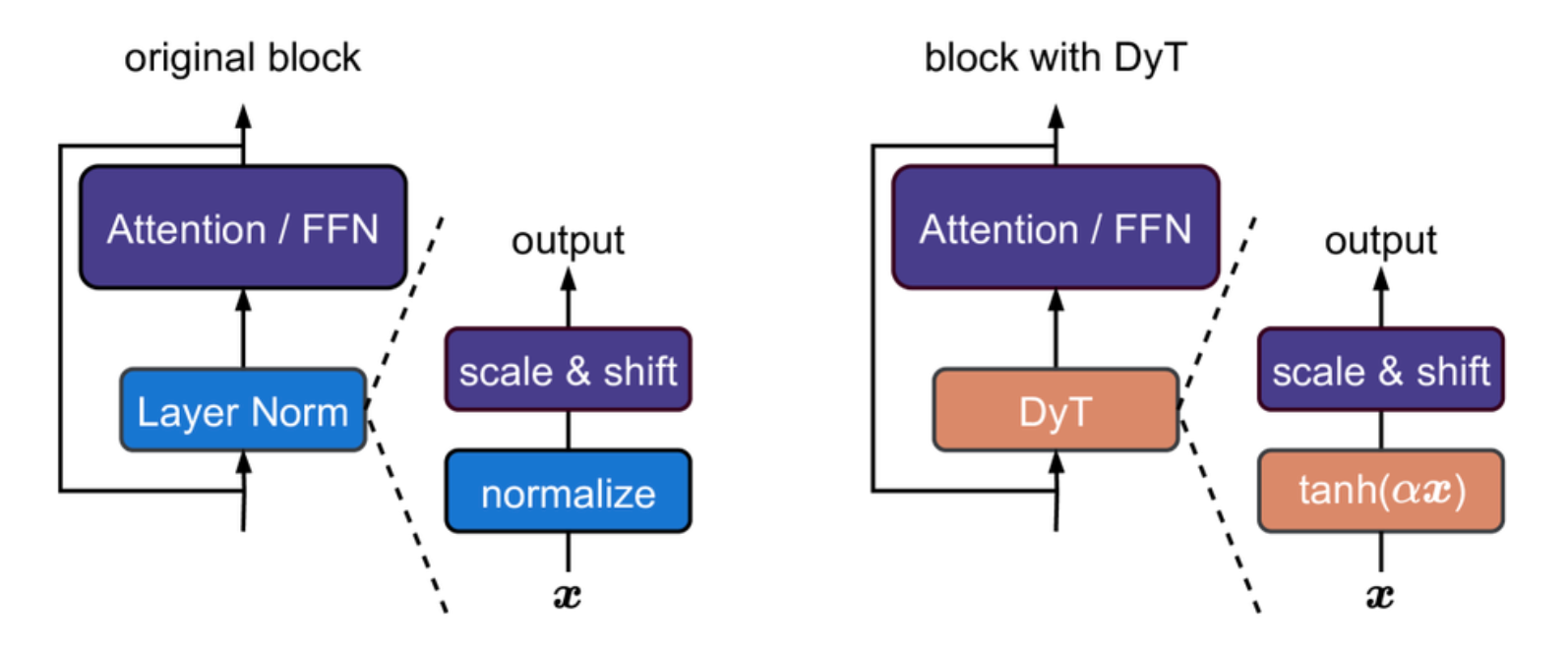
2.4 DyT
中英文对照论文:Transformers without normlization
- 灵感来源
就很随意
实验尝试(不同模型不同层数的Norm层前后分布对比):
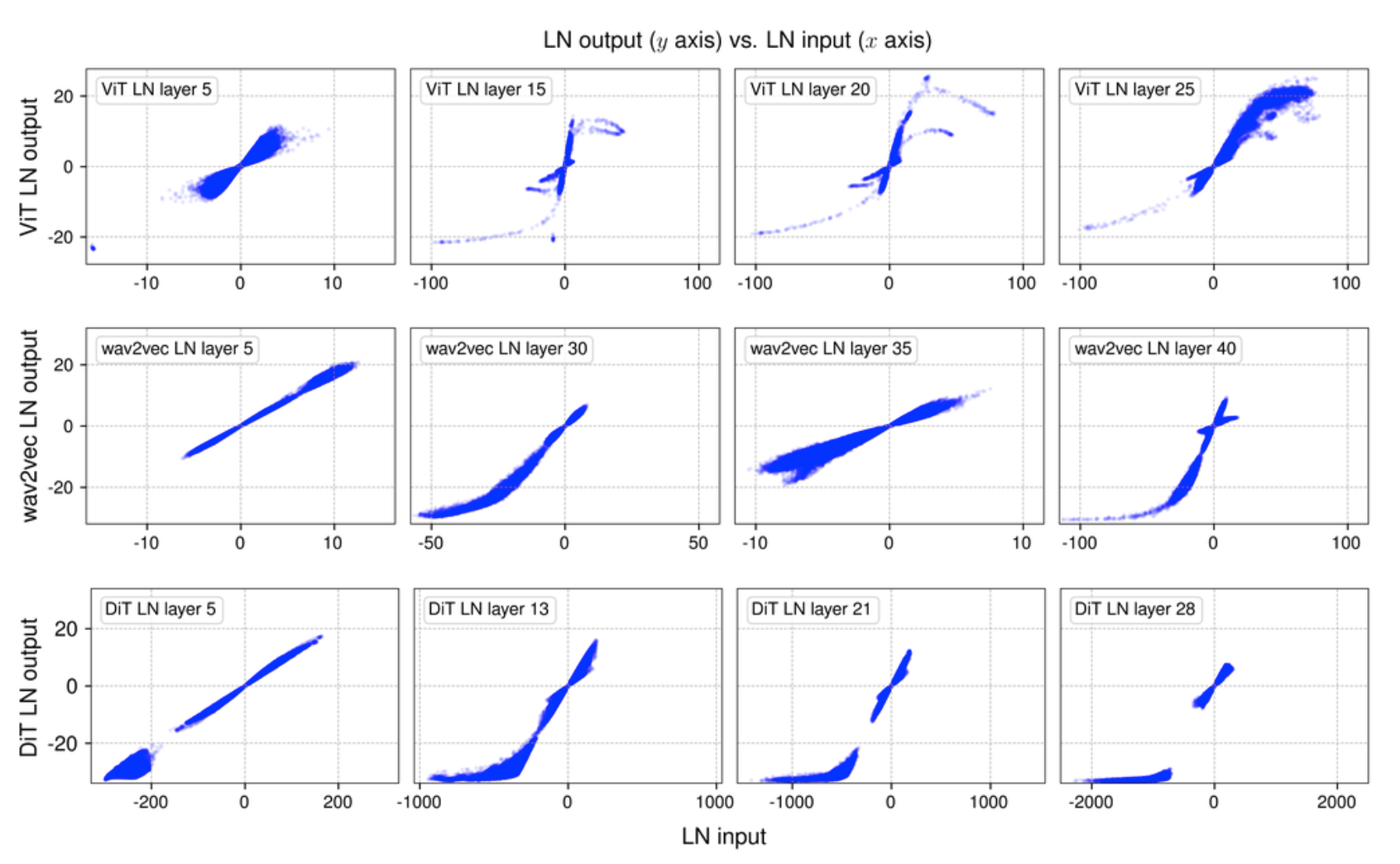
浅层的时候往往输入输出分布偏向线性
论文所给伪代码
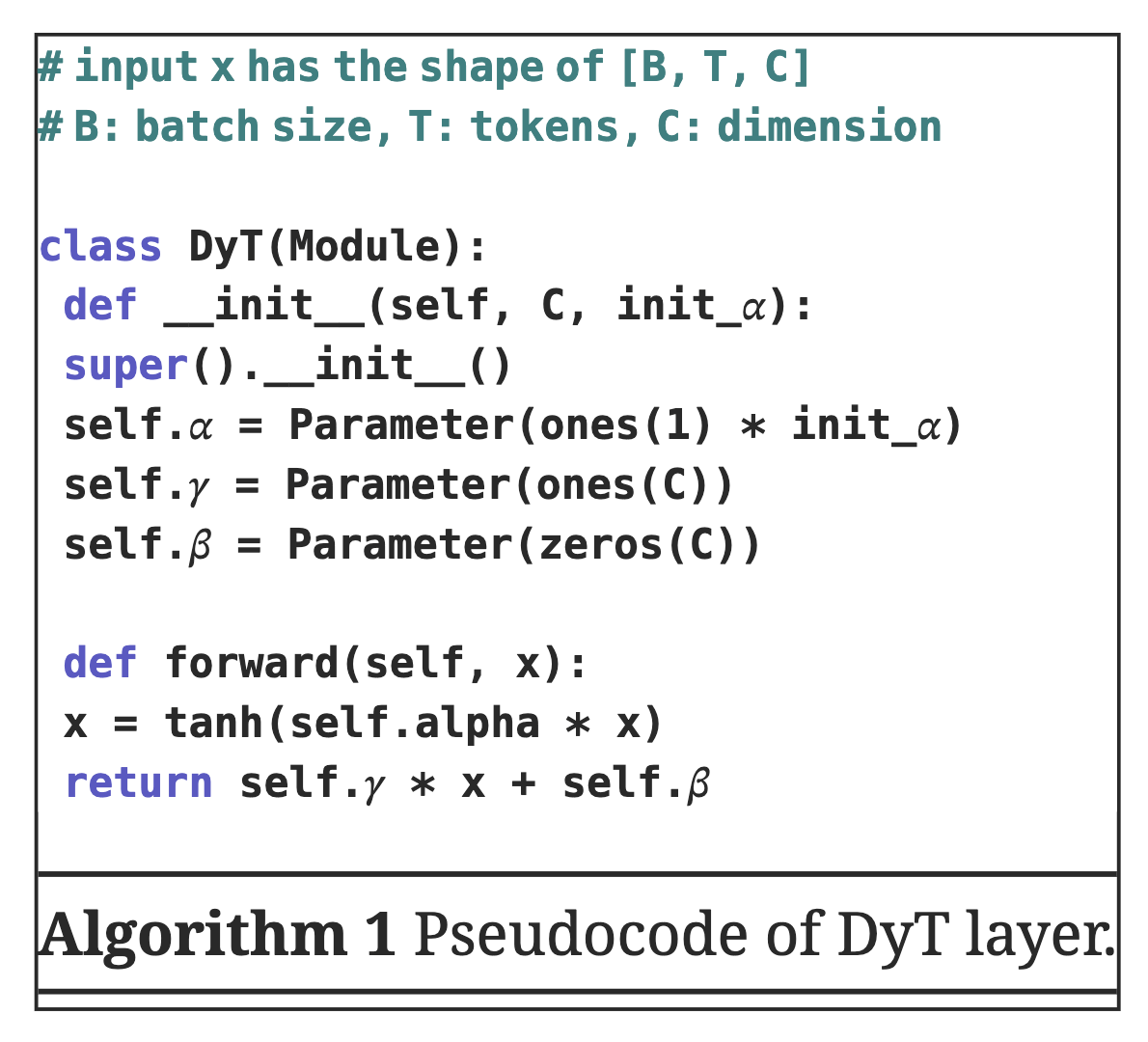
具体尝试我暂时还未进行,就先不试了
3. 其他相关内容
3.1 Post-Norm & Pre-Norm
Pre-Norm大模型中常用
这部分内容是大模型帮我整理的(哈哈哈哈,原谅我不太想整理这块)
- 结构
结合Transformer那块知识,一个是在残差前,一个在残差后
Output_{post}=LayerNorm(x+SubLayer(x)) \\ Output_{pre}=x+SubLayer(LayerNorm(x)) 公式1:PostNorm(x)=x+LayerNorm(FeedForward(x+LayerNorm(Attention(x)))) \\\\ 公式2:PreNorm(x)=x+FeedForward(LayerNorm(x))+Attention(LayerNorm(x))| 特性 | Post-Norm | Pre-Norm |
|---|---|---|
| 公式 | 公式1 | 公式2 |
| 位置 | 残差后 | 残差前 |
| 出现时间 | 原始 Transformer(Vaswani et al., 2017) | 之后发展(如 GPT-2 等) |
| 优点 | 收敛后表现略好(某些任务) | 更稳定,训练深层模型不易梯度消失 |
| 缺点 | 深层模型中容易梯度消失/爆炸 | 可能最终性能略低,但更容易训练 |
| 应用情况 | BERT、初版Transformer | GPT系列、T5、LLama等大模型 |
| 模型 | 归一化类型 |
|---|---|
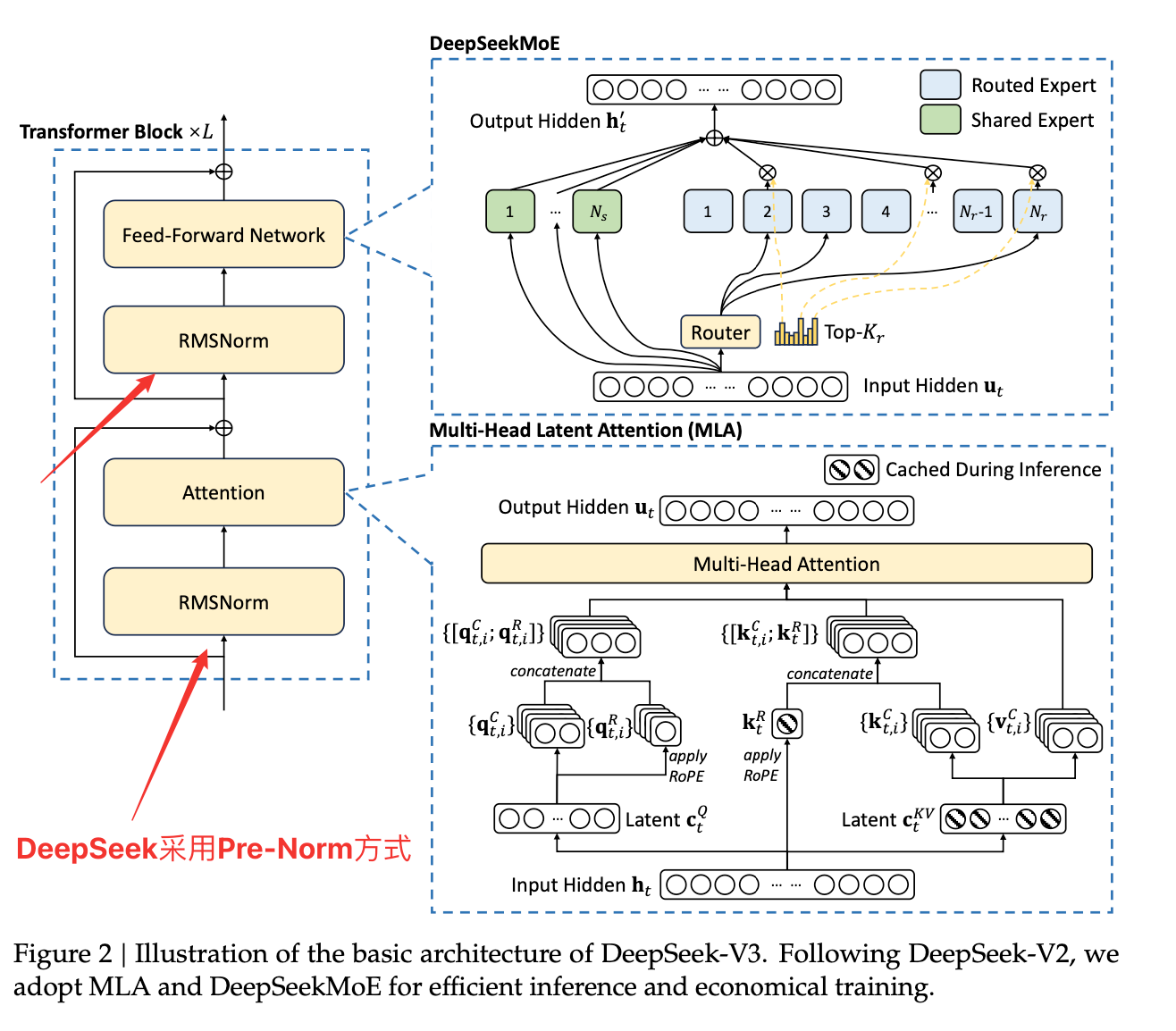
| DeepSeek | Pre-Norm |
| GPT-2/3/4 | Pre-Norm |
| BERT | Post-Norm |
| T5 | Pre-Norm |
| LLaMA | Pre-Norm |
| Transformer XL | Pre-Norm |
| 原始 Transformer | Post-Norm |
- 选择 任务复杂度: 简单任务用 PostNorm,复杂任务用 PreNorm。 模型深度: 深层模型优先选择 PreNorm。
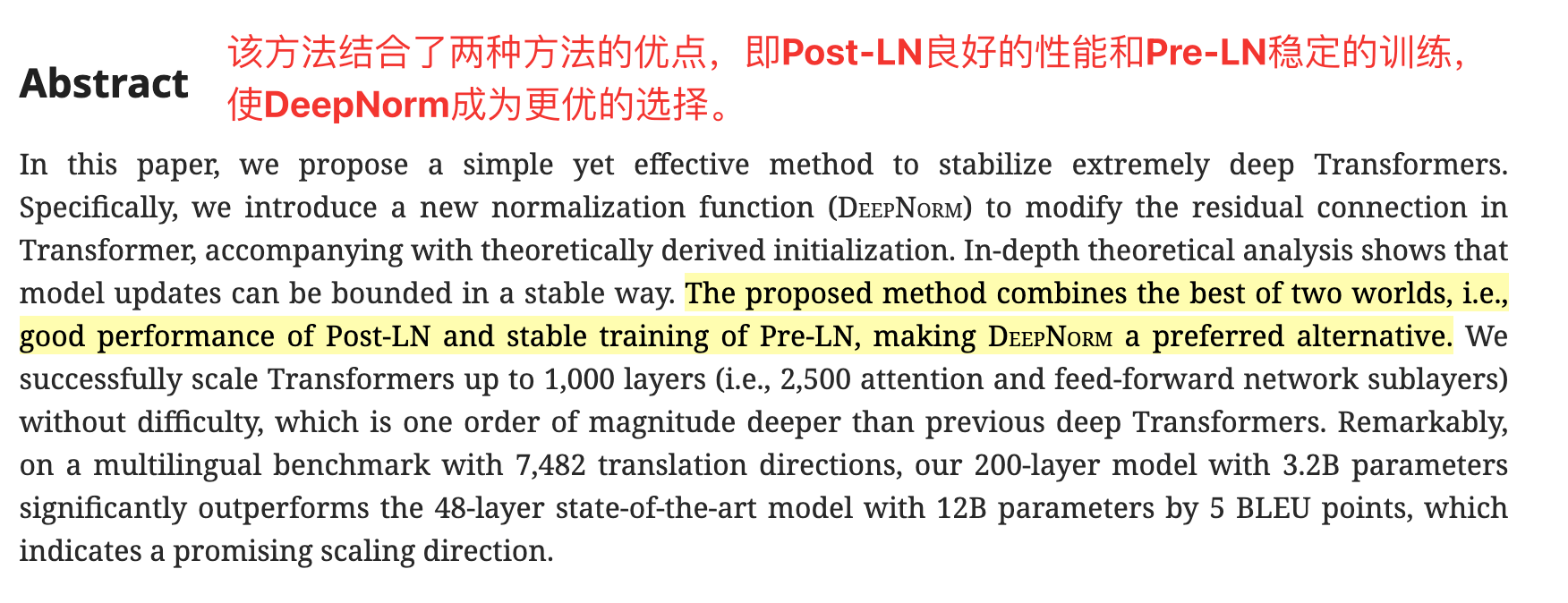
3.2 Deep Norm
关键成果
DeepNorm 是微软在 2022 年提出的改进方法(论文 "DeepNet: Scaling Transformers to 1,000 Layers"),基于 Post-Norm 但大幅提升了深层训练的稳定性,可支持超深层(如 1000 层)Transformer 的训练。
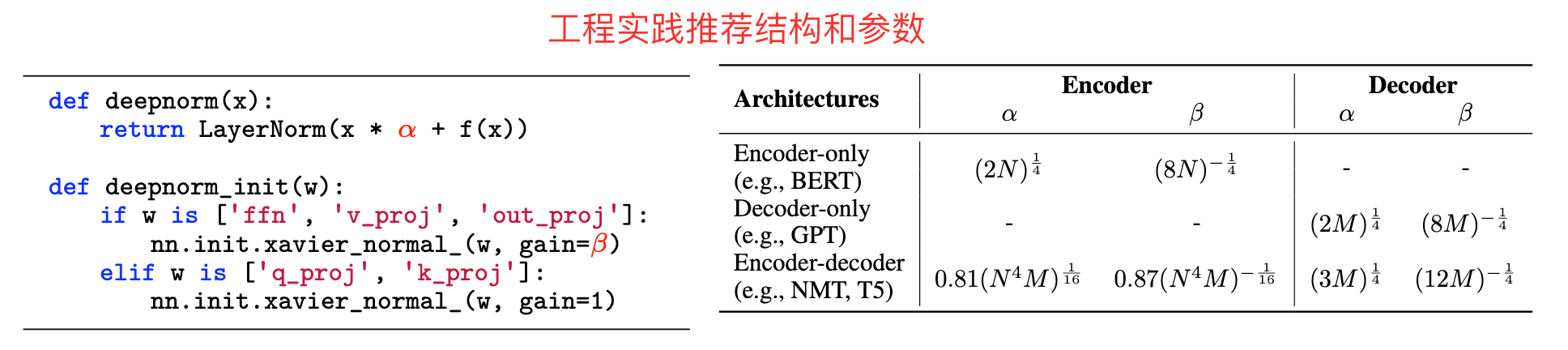
基本结构
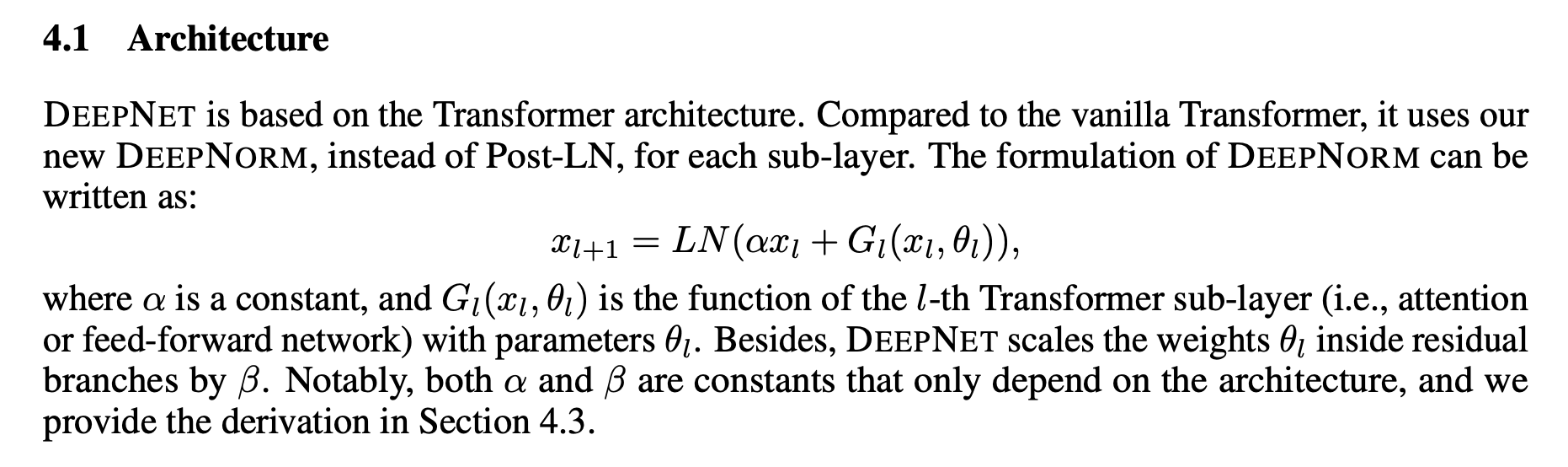
原始残差结构:
DeepNorm:
- 暂时不想细读这篇论文啦(后续补充)
思考:
- DeepNorm中的是哪里的参数?
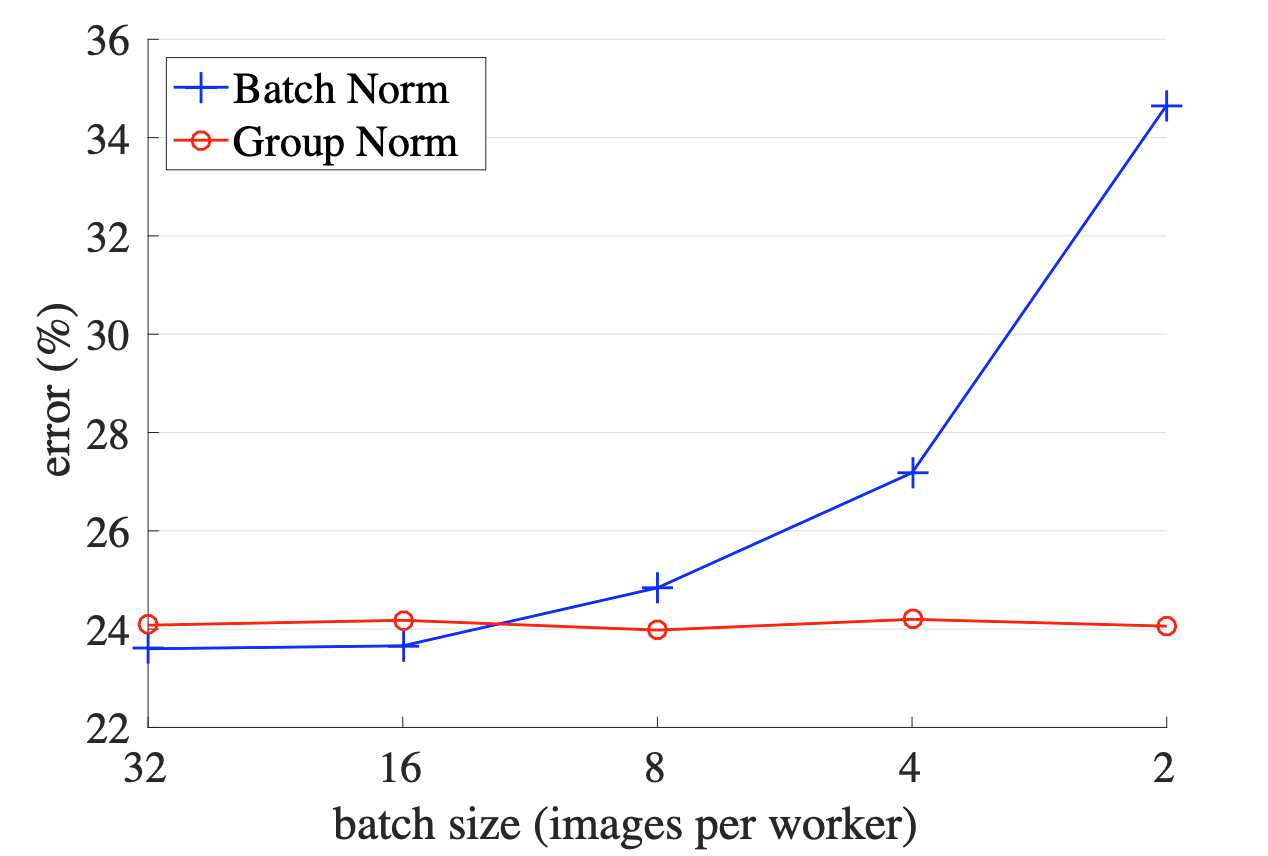
3.3 Group Norm
笔者理解:是对BN进行改进,将channel进行分组,然后组内Norm
论文链接:Group Norm
效果
3.4 Instance Norm
没咋看,看论文是在CV领域用的
论文链接:Instance Norm
4. 代码实现
4.1 Batch Norm
class BatchNorm(nn.Module):
def __init__(self, num_features, eps=1e-5, momentum=0.1):
super(BatchNorm, self).__init__()
self.num_features = num_features
self.eps = eps
self.gamma = nn.Parameter(torch.ones(num_features)) # 这俩是可学习参数
self.beta = nn.Parameter(torch.zeros(num_features))
self.momentum = momentum
# 这里不使用buffer注册,用属性简单实现
self.running_mean = torch.ones(num_features)
self.running_var = torch.zeros(num_features)
def forward(self, x, training=True):
if training:
batch_mean = x.mean(dim=0)
batch_var = x.var(dim=0, unbiased=False) # 计算时候无偏,存储时候有偏
print("batch_mean shape, batch_var shape:", batch_mean.shape, batch_var.shape)
self.running_mean = (1 - self.momentum) * self.running_mean + self.momentum * batch_mean
self.running_var = (1 - self.momentum) * self.running_var + self.momentum * batch_var
print("self.running_mean, self.running_var:", self.running_mean, self.running_var)
else:
batch_mean, batch_var = self.running_mean, self.running_var
return self.gamma * (x - batch_mean) / (torch.sqrt(batch_var + self.eps)) + self.beta
if __name__ == '__main__':
batch_norm = BatchNorm(10)
ipt = torch.randn(size=(2, 10))
print(ipt[1].shape)
res = batch_norm(ipt)
print(res)
print(res.min(dim=0), res.max(dim=0))4.2 Layer Norm
# 这里我只实现NLP的样式
class LayerNormImpl(nn.Module):
def __init__(self, normalized_shape: tuple, eps=1e-5):
super().__init__()
self.eps = eps
self.gamma = nn.Parameter(torch.ones(normalized_shape))
self.beta = nn.Parameter(torch.zeros(normalized_shape))
def forward(self, x): # [batch_szie, seq_len, embedding_dim]
emb_mean = x.mean(dim=-1, keepdim=True)
emb_var = x.var(dim=-1, keepdim=True, unbiased=False)
norm_x = (x - emb_mean) / (torch.sqrt(emb_var + self.eps))
return self.gamma * norm_x + self.beta
if __name__ == '__main__':
batch_size, seq_length, embedding_dim = 2, 5, 10
embedding_size = [batch_size, seq_length, embedding_dim]
ipt = torch.randn(batch_size, seq_length, embedding_dim)
layer_norm = LayerNormImpl(embedding_size)
out = layer_norm(ipt)
print(out.shape)
print(out.max(dim=-1), out.min(dim=-1))4.3 RMS Norm
# 对Layer Norm的优化,采用均方根,并假设重新计算的中心化无关(去掉平移)
class RMSNorm(nn.Module):
def __init__(self, normlized_shape: tuple, eps=1e-5):
super().__init__()
self.normlized_shape = normlized_shape
self.eps = eps
self.gamma = nn.Parameter(torch.ones(normlized_shape))
def forward(self, x):
# print(tuple(x.shape) == self.normlized_shape)
assert tuple(x.shape) == self.normlized_shape, "归一化形状与输入形状不一致"
rms = torch.sqrt(x.pow(2).mean(dim=-1, keepdim=True) + self.eps)
return self.gamma * x / rms
if __name__ == '__main__':
batch_size, seq_length, embedding_dim = 2, 5, 10
embedding_size = (batch_size, seq_length, embedding_dim)
ipt = torch.randn(embedding_size)
rms_norm = RMSNorm(embedding_size)
out = rms_norm(ipt)
print(out.shape)
print(out.max(dim=-1), out.min(dim=-1))NOTE
在工程中,RMSNorm会和输入之前的Linear操作放在一起执行,也就是分母直接换成上层的Linear操作
4.4 DyT
from torch.nn.functional import tanh
class DyT(nn.Module):
def __init__(self, normlizated_shape: tuple, init_alpha=0.5):
super().__init__()
self.normlizated_shape = normlizated_shape
self.alpha = nn.Parameter(torch.ones(1) * init_alpha)
self.gamma = nn.Parameter(torch.ones(normlizated_shape))
self.beta = nn.Parameter(torch.zeros(normlizated_shape))
def forward(self, x):
assert tuple(x.shape) == self.normlizated_shape, "输入形状与归一化形状不匹配"
x = tanh(self.alpha * x)
return self.gamma * x + self.beta
if __name__ == '__main__':
batch_size, seq_length, embedding_dim = 2, 5, 10
embedding_size = (batch_size, seq_length, embedding_dim)
ipt = torch.randn(embedding_size)
dyt = DyT(embedding_size)
res = dyt(ipt)n. 面试问题
BN和LN有什么区别?
python# PyTorch源码里面的说法值得借鉴一下 .. note:: Unlike Batch Normalization and Instance Normalization, which applies scalar scale and bias for each entire channel/plane with the :attr:`affine` option, Layer Normalization applies per-element scale and bias with :attr:`elementwise_affine`. # 当然,除了最后的`affine`的性质不同外,针对的归一化维度也不同 # 一个是在batch/channel维度,一个是在embedding维度(当然也可以在channel维度进行),对应的应用场景不同为啥不用BN来做NLP?
BN的训练和推理有什么不同?
讲讲Pre-Norm和Post-Norm。