0 Megatron-LM ZeRO-1
目前Megatron-LM 里实现的是 ZeRO-1. 结合DistributedDataParallel 实现。
1 启动
此处将torchrun 传入的环境变量打包成worker_env 传入启动的进程里。每个进程根据特定的环境变量来对进程组进行初始化(init_process_group)。
-代码链接
def _start_workers(self, worker_group: WorkerGroup) -> Dict[int, Any]:
spec = worker_group.spec
store = worker_group.store
assert store is not None
restart_count = spec.max_restarts - self._remaining_restarts
use_agent_store: bool = spec.rdzv_handler.use_agent_store
logger.info("use_agent_store: %s", use_agent_store)
args: Dict[int, Tuple] = {}
envs: Dict[int, Dict[str, str]] = {}
log_line_prefixes: Optional[Dict[int, str]] = (
{} if self._log_line_prefix_template else None
)
for worker in worker_group.workers:
local_rank = worker.local_rank
worker_env = {
"LOCAL_RANK": str(local_rank),
"RANK": str(worker.global_rank),
"GROUP_RANK": str(worker_group.group_rank),
"ROLE_RANK": str(worker.role_rank),
"ROLE_NAME": spec.role,
"LOCAL_WORLD_SIZE": str(spec.local_world_size),
"WORLD_SIZE": str(worker.world_size),
"GROUP_WORLD_SIZE": str(worker_group.group_world_size),
"ROLE_WORLD_SIZE": str(worker.role_world_size),
"MASTER_ADDR": worker_group.master_addr,
"MASTER_PORT": str(worker_group.master_port),
"TORCHELASTIC_RESTART_COUNT": str(restart_count),
"TORCHELASTIC_MAX_RESTARTS": str(spec.max_restarts),
"TORCHELASTIC_RUN_ID": spec.rdzv_handler.get_run_id(),
"TORCHELASTIC_USE_AGENT_STORE": str(use_agent_store),
"TORCH_NCCL_ASYNC_ERROR_HANDLING": os.getenv(
"TORCH_NCCL_ASYNC_ERROR_HANDLING", str(1)
),
}
if "OMP_NUM_THREADS" in os.environ:
worker_env["OMP_NUM_THREADS"] = os.environ["OMP_NUM_THREADS"]
if self._log_line_prefix_template:
log_line_prefix = Template(
self._log_line_prefix_template
).safe_substitute(
role_name=spec.role,
rank=worker.global_rank,
local_rank=local_rank,
)
log_line_prefixes[local_rank] = log_line_prefix
envs[local_rank] = worker_env
worker_args = list(spec.args)
worker_args = macros.substitute(worker_args, str(local_rank))
args[local_rank] = tuple(worker_args)
self._setup_local_watchdog(envs=envs)
self._setup_healthcheck()
assert spec.entrypoint is not None
assert self._logs_specs is not None
self._pcontext = start_processes(
name=spec.role,
entrypoint=spec.entrypoint,
args=args,
envs=envs,
logs_specs=self._logs_specs,
log_line_prefixes=log_line_prefixes,
start_method=self._start_method,
)
return self._pcontext.pids()2 megatron-lm 中进程组的初始化
2.1 初始化进程组
def _initialize_distributed(get_embedding_ranks, get_position_embedding_ranks):
"""Initialize torch.distributed and core model parallel."""
args = get_args()
device_count = torch.cuda.device_count()
if torch.distributed.is_initialized():
if args.rank == 0:
print(
"torch distributed is already initialized, "
"skipping initialization ...",
flush=True,
)
args.rank = torch.distributed.get_rank()
args.world_size = torch.distributed.get_world_size()
else:
if args.rank == 0:
print("> initializing torch distributed ...", flush=True)
# Manually set the device ids.
if device_count > 0:
torch.cuda.set_device(args.local_rank)
device_id = torch.device(f'cuda:{args.local_rank}')
else:
device_id = None
# Call the init process
init_process_group_kwargs = {
'backend' : args.distributed_backend,
'world_size': args.world_size,
'rank': args.rank,
'timeout': timedelta(minutes=args.distributed_timeout_minutes),
}
torch.distributed.init_process_group(**init_process_group_kwargs)
# Set the tensor model-parallel, pipeline model-parallel, and
# data-parallel communicators.
if device_count > 0:
if mpu.model_parallel_is_initialized():
print("model parallel is already initialized")
else:
mpu.initialize_model_parallel(
args.tensor_model_parallel_size,
args.pipeline_model_parallel_size,
args.virtual_pipeline_model_parallel_size,
args.pipeline_model_parallel_split_rank,
context_parallel_size=args.context_parallel_size,
hierarchical_context_parallel_sizes=args.hierarchical_context_parallel_sizes,
expert_model_parallel_size=args.expert_model_parallel_size,
num_distributed_optimizer_instances=args.num_distributed_optimizer_instances,
expert_tensor_parallel_size=args.expert_tensor_parallel_size,
distributed_timeout_minutes=args.distributed_timeout_minutes,
nccl_communicator_config_path=args.nccl_communicator_config_path,
order='tp-cp-ep-dp-pp' if not args.use_tp_pp_dp_mapping else 'tp-pp-dp',
encoder_tensor_model_parallel_size=args.encoder_tensor_model_parallel_size,
encoder_pipeline_model_parallel_size=args.encoder_pipeline_model_parallel_size,
get_embedding_ranks=get_embedding_ranks,
get_position_embedding_ranks=get_position_embedding_ranks,
)
if args.rank == 0:
print(
f"> initialized tensor model parallel with size "
f"{mpu.get_tensor_model_parallel_world_size()}"
)
print(
f"> initialized pipeline model parallel with size "
f"{mpu.get_pipeline_model_parallel_world_size()}"
)2.2 划分进程组
在 mpu.initialize_model_parallel 里进行真正的各不同ProcessGroup里进程组的初始化。每个进程可能会创建多个进程组。
new_group
Let's say we have a total of 16 GPUs denoted by g0 ... g15 and we use 2 GPUs to parallelize the model tensor, and 4 GPUs to parallelize the model pipeline.
The present function will create 8 tensor model-parallel groups, 4 pipeline model-parallel groups and 8 data-parallel groups as:
8 data_parallel groups:
[g0, g2], [g1, g3], [g4, g6], [g5, g7], [g8, g10], [g9, g11], [g12, g14], [g13, g15]
8 tensor model-parallel groups:
[g0, g1], [g2, g3], [g4, g5], [g6, g7], [g8, g9], [g10, g11], [g12, g13], [g14, g15]
4 pipeline model-parallel groups:
[g0, g4, g8, g12], [g1, g5, g9, g13], [g2, g6, g10, g14], [g3, g7, g11, g15]
Note that for efficiency, the caller should make sure adjacent ranks are on the same DGX box(机箱). For example if we are using 2 DGX-1 boxes
with a total of 16 GPUs, rank 0 to 7 belong to the first box and ranks 8 to 15 belong to the second box.进程组与GPU对应关系

2.3 进程组并行状态管理
每个进程中会拥有多个进程组,分别来控制当前进程的DP、TP、PP等通信任务。当前进程的所有进程组作为全局变量存储在parallel_state.py中。
# Intra-layer model parallel group that the current rank belongs to.
_TENSOR_MODEL_PARALLEL_GROUP = None
# Inter-layer model parallel group that the current rank belongs to.
_PIPELINE_MODEL_PARALLEL_GROUP = None
# Model parallel group (both intra- and pipeline) that the current rank belongs to.
_MODEL_PARALLEL_GROUP = None
# Model parallel group (both intra-, pipeline, and expert) that the current rank belongs to.
_MODEL_AND_EXPERT_PARALLEL_GROUP = None
# Embedding group.
_EMBEDDING_GROUP = None
# Position embedding group.
_POSITION_EMBEDDING_GROUP = None
# Data parallel group that the current rank belongs to.
_DATA_PARALLEL_GROUP = None
_DATA_PARALLEL_GROUP_GLOO = None
# tensor model parallel group and data parallel group combined
# used for fp8 and moe training
_TENSOR_AND_DATA_PARALLEL_GROUP = None
# Expert parallel group that the current rank belongs to.
_EXPERT_MODEL_PARALLEL_GROUP = None
_TENSOR_AND_EXPERT_PARALLEL_GROUP = None
_DATA_MODULO_EXPERT_PARALLEL_GROUP = None
_DATA_MODULO_EXPERT_PARALLEL_GROUP_GLOO = None
_DATA_MODULO_EXPERT_PARALLEL_GROUP_WITH_CP = None
_DATA_MODULO_EXPERT_PARALLEL_GROUP_WITH_CP_GLOO = None
_VIRTUAL_PIPELINE_MODEL_PARALLEL_RANK = None
_VIRTUAL_PIPELINE_MODEL_PARALLEL_WORLD_SIZE = None
_PIPELINE_MODEL_PARALLEL_SPLIT_RANK = None
_PIPELINE_MODEL_PARALLEL_DECODER_START = None
# These values enable us to change the mpu sizes on the fly.
_MPU_TENSOR_MODEL_PARALLEL_WORLD_SIZE = None
_MPU_PIPELINE_MODEL_PARALLEL_WORLD_SIZE = None
_MPU_EXPERT_MODEL_PARALLEL_WORLD_SIZE = None
_MPU_DATA_PARALLEL_WORLD_SIZE = None
_MPU_DATA_PARALLEL_RANK = None
_MPU_TENSOR_MODEL_PARALLEL_RANK = None
_MPU_PIPELINE_MODEL_PARALLEL_RANK = None
_MPU_EXPERT_MODEL_PARALLEL_RANK = None
# A list of ranks that have a copy of the embedding.
_EMBEDDING_GLOBAL_RANKS = None
# A list of ranks that have a copy of the position embedding.
_POSITION_EMBEDDING_GLOBAL_RANKS = None
# A list of global ranks for each pipeline group to ease calculation of the source
# rank when broadcasting from the first or last pipeline stage.
_PIPELINE_GLOBAL_RANKS = None
# A list of global ranks for each data parallel group to ease calculation of the source
# rank when broadcasting weights from src to all other data parallel ranks
_DATA_PARALLEL_GLOBAL_RANKS = None
# A list of global ranks for each tensor model parallel group to ease calculation of
# the first local rank in the tensor model parallel group
_TENSOR_MODEL_PARALLEL_GLOBAL_RANKS = None
# Context parallel group that the current rank belongs to
_CONTEXT_PARALLEL_GROUP = None
# A list of global ranks for each context parallel group to ease calculation of the
# destination rank when exchanging KV/dKV between context parallel_ranks
_CONTEXT_PARALLEL_GLOBAL_RANKS = None
# Data parallel group information with context parallel combined.
_DATA_PARALLEL_GROUP_WITH_CP = None
_DATA_PARALLEL_GROUP_WITH_CP_GLOO = None
_DATA_PARALLEL_GLOBAL_RANKS_WITH_CP = None
# combined parallel group of TP and CP
_TENSOR_AND_CONTEXT_PARALLEL_GROUP = None
# combined parallel group of TP, DP, and CP used for fp8
_TENSOR_AND_DATA_PARALLEL_GROUP_WITH_CP = None
# Memory buffers to avoid dynamic memory allocation
_GLOBAL_MEMORY_BUFFER = None
# MOE logging
_MOE_LAYER_WISE_LOGGING_TRACKER = {}3 Megatron-lm 中的数据并行
3.1 数据并行调用栈
__init__ distributed_data_parallel.py:44
<listcomp> training.py:534
get_model training.py:534
setup_model_and_optimizer training.py:617
pretrain training.py:289
<module> pretrain_gpt.py:2783.2 Zero-1 数据组织

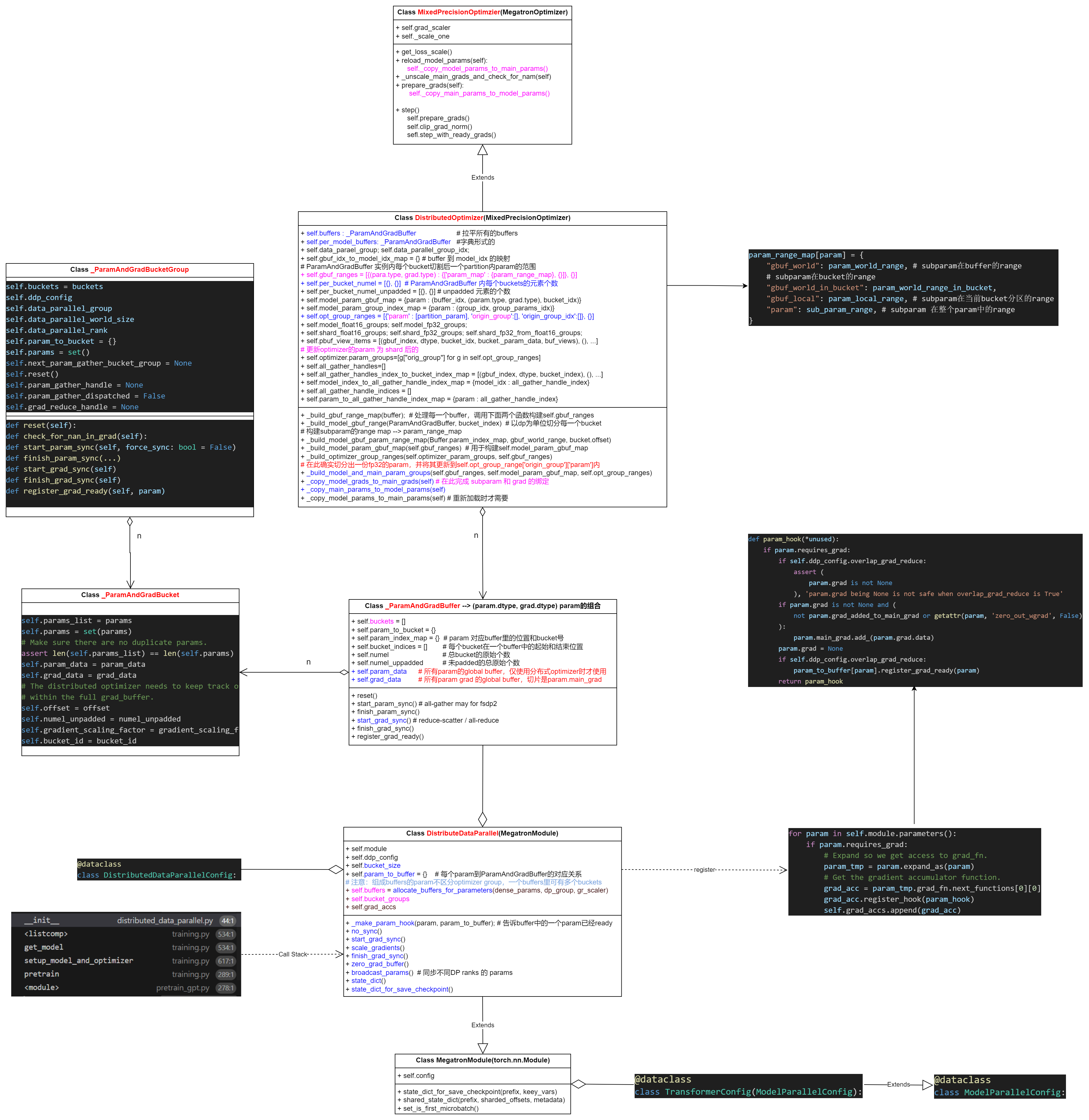
4 DistributedOptimizer
一个buffer会却分成多个bucket, Zero 是在Bucket上进行切分的。buffer里的每个bucket都要切成data_parallel_world_size份。
几个关键函数:
4.1 _build_gbuf_range_map
代码将遍历梯度缓冲区(grad buffer)的所有桶(buckets),以构建当前进程“拥有”的参数范围(注意是当前进程在buffer里的参数范围)。
这里的“拥有”是指每个进程负责梯度缓冲区中每个桶的特定分片(shard),其中每个分片的大小是桶大小的1/dp_world_size,dp_world_size是数据并行组中的进程数量。
4.2 __build_model_gbuf__param_range_map
由于梯度缓冲区的分区方式不考虑参数边界,因此每个数据并行进程实际上是在对梯度缓冲区的视图(views)进行操作,而不是直接对完整的参数进行操作。
这些操作包括梯度的规约(reduce)和参数的更新(gather)。
4.3 optimizer state
- 鉴于之前方法中创建的概念性梯度缓冲区划分并不遵循参数的边界,优化器操作的是模型参数的分片,而非完整参数。
5 代码结构
6 实现细节
6.1 区分dense_param 和 expert_parallel_params
if getattr(param, 'allreduce', True):
dense_params.append(param)
else:
expert_parallel_params.append(param)6.2 按照param_dtype 和 grad_dtype 分组
# Get the index of each param among the params with same dtype, if a param is fp8,
# use its "fake" high precision dtype to find which params have same dtype with it.
# For example:
# Case 1:
# params = [p1(bf16), p2(bf16), p3(bf16), p4(bf16)]
# param_and_grad_dtype_to_indices = {
# (torch.bfloat16, torch.float32): [0, 1, 2, 3],
# }
# Case 2:
# params = [p1(bf16), p2(fp8), p3(fp8), p4(bf16)]
# param_and_grad_dtype_to_indices = {
# (torch.bfloat16, torch.float32): [0, 3],
# (torch.uint8, torch.float32): [1, 2],
# }
# We need these indices to load a non-native-fp8 checkpoint in native-fp8 mode.6.3 将分组的Params用_ParamAndGradBuffer 封装
# Allocate the grad buffers and map the grads.
buffers = []
for (param_dtype, grad_dtype), params in param_and_grad_dtype_to_params.items():
buffers.append(
_ParamAndGradBuffer(
self.ddp_config,
param_dtype,
grad_dtype,
params,
data_parallel_group,
self.bucket_size,
param_to_name,
gradient_scaling_factor,
param_and_grad_dtype_to_indices[(param_dtype, grad_dtype)],
)
)6.4 遍历Parameters 得到每self.bucket_indices self.numel 等参数
6.5 总buffer的初始化 : self.param_data and self.grad_data
# Only re-map param tensors if using distributed optimizer.
if self.ddp_config.use_distributed_optimizer:
self.param_data = torch.zeros(
self.numel,
dtype=self.param_dtype,
device=torch.cuda.current_device(),
requires_grad=False,
)
self.grad_data = torch.zeros(
self.numel,
dtype=self.grad_dtype,
device=torch.cuda.current_device(),
requires_grad=False,
)6.6 显存copy,并构造bucket
def _get(self, shape: torch.Size, start_index: int, buffer_type: BufferType) -> torch.Tensor:
"""
Return a tensor with the input `shape` as a view into the 1-D data starting at
`start_index`.
"""
end_index = start_index + shape.numel()
assert end_index <= self.numel, 'Requested tensor is out of buffer range'
if buffer_type == BufferType.PARAM:
assert self.param_data is not None
buffer_tensor = self.param_data[start_index:end_index]
elif buffer_type == BufferType.GRAD:
buffer_tensor = self.grad_data[start_index:end_index]
else:
raise Exception("Illegal buffer type provided to GradBuffer._get() function")
buffer_tensor = buffer_tensor.view(shape)
return buffer_tensor
for param in params[::-1]:
param_start_index, param_end_index, bucket_id = self.param_index_map[param]
# Assign param.data to appropriate segment of self.param_data.
if self.param_data is not None:
old_param_data = param.data
new_param_data = self._get(
param.data.shape, param_start_index, buffer_type=BufferType.PARAM
)
if is_float8tensor(param):
param._data = new_param_data
else:
param.data = new_param_data
assert old_param_data._base is None
# Copy tensor values (from initialization or checkpoint).
param.data.detach().copy_(old_param_data)
del old_param_data # Free origin memory.
param.main_grad = self._get( # Gradient buffer.
param.data.shape, param_start_index, buffer_type=BufferType.GRAD
)6.6 每个param都事先准备一个main_grad
param.main_grad = self._get( # Gradient buffer.
param.data.shape, param_start_index, buffer_type=BufferType.GRAD
)6.7 _ParamAndGradBucket 里初始化
零散的params
合并的param_data
合并的grad_data
bucketed_param_data = None
if self.param_data is not None:
bucketed_param_data = self._get(
torch.Size([end_index - start_index]), start_index, buffer_type=BufferType.PARAM
)
bucketed_grad_data = self._get(
torch.Size([end_index - start_index]), start_index, buffer_type=BufferType.GRAD
)
bucket = _ParamAndGradBucket(
params=bucket_params,
param_data=bucketed_param_data,
grad_data=bucketed_grad_data,
offset=start_index,
numel_unpadded=numel_unpadded,
gradient_scaling_factor=self.gradient_scaling_factor,
bucket_id=bucket_id,
)
for bucket_param in bucket_params:
assert bucket_param not in self.param_to_bucket
self.param_to_bucket[bucket_param] = bucket
return bucket6.8 注意:DP 组 和 Context 组 可能会耦合
# Allocate the param+grad buffers for dense params' grads.
self.buffers, self.bucket_groups = _allocate_buffers_for_parameters(
dense_params,
parallel_state.get_data_parallel_group(with_context_parallel=True),
gradient_scaling_factor=gradient_scaling_factor,
)
def get_data_parallel_group(with_context_parallel=False):
"""Get the data-parallel group the caller rank belongs to."""
if with_context_parallel:
assert (
_DATA_PARALLEL_GROUP_WITH_CP is not None
), 'data parallel group with context parallel combined is not initialized'
return _DATA_PARALLEL_GROUP_WITH_CP
else:
assert _DATA_PARALLEL_GROUP is not None, 'data parallel group is not initialized'
return _DATA_PARALLEL_GROUP6.8 partition_buckets 将 每个buffer里的bucket打包成总的bucket group
bucket_groups = partition_buckets(buffers, force_single_bucket_group=disable_bucketing)
def partition_buckets(
buffers: List[_ParamAndGradBuffer], force_single_bucket_group: bool = False
) -> List[_ParamAndGradBucketGroup]:6.9 首尾连接 各bucket
因为分布式优化器逆向做all-gather in reverse order of bucket
# Set `next_param_gather_bucket_group` for different bucket groups by iterating through
# buckets in reverse order (since all-gathers happen in reverse order of buckets).
if self.ddp_config.use_distributed_optimizer and self.ddp_config.overlap_param_gather:
num_bucket_groups = len(bucket_groups)
for i in range(1, num_bucket_groups):
bucket_groups[num_bucket_groups - i].next_param_gather_bucket_group = (
bucket_groups[num_bucket_groups - i - 1]
)6.10 建立param 到 每个bucket的映射关系
# Create map from param to bucket group, used in pre_hook.
for bucket_group in bucket_groups:
for bucket in bucket_group.buckets:
for param in bucket.params_list:
self.param_to_bucket_group[param] = bucket_group6.11 上述流程最终返回 self.buffers, self.bucket_groups
# Allocate the param+grad buffers for dense params' grads.
self.buffers, self.bucket_groups = _allocate_buffers_for_parameters(
dense_params,
parallel_state.get_data_parallel_group(with_context_parallel=True),
gradient_scaling_factor=gradient_scaling_factor,
)6.12 单独创建专家的 buffer 和 bucket_groups
# Allocate separate param+grad buffers for expert parallel params' grads.
self.expert_parallel_buffers, self.expert_parallel_bucket_groups = (
_allocate_buffers_for_parameters(
expert_parallel_params,
parallel_state.get_data_modulo_expert_parallel_group(with_context_parallel=True),
gradient_scaling_factor=expert_gradient_scaling_factor,
)
)6.13 为每个参数注册反向钩子函数
# Register backward hook.
# Accumulation function for the gradients need to be stored so they
# don't go out of scope.
self.grad_accs = []
for param in self.module.parameters():
if param.requires_grad:
# Expand so we get access to grad_fn.
param_tmp = param.expand_as(param)
# Get the gradient accumulator function.
grad_acc = param_tmp.grad_fn.next_functions[0][0]
grad_acc.register_hook(self._make_backward_post_hook(param))
self.grad_accs.append(grad_acc)6.14 具体的反向钩子函数
param的梯度copy到 main_grad, 同时将param里的自带grad 清空 : param.grad = None
该bucket里param均计算完事后,register_grad_ready, 并开始ReduceScatter
def _make_backward_post_hook(self, param: torch.nn.Parameter):
"""
Creates a backward post-hook to dispatch an all-reduce / reduce-scatter when
ready (i.e., when all grads in a bucket have been computed in all microbatches
in a batch).
"""
def hook(*unused):
if param in self.param_to_bucket_group:
assert param.requires_grad
if self.ddp_config.overlap_grad_reduce:
assert (
param.grad is not None
), 'param.grad being None is not safe when overlap_grad_reduce is True'
if param.grad is not None and (
not param.grad_added_to_main_grad or getattr(param, 'zero_out_wgrad', False)
):
param.main_grad.add_(param.grad.data)
param.grad = None
if self.ddp_config.overlap_grad_reduce:
self.param_to_bucket_group[param].register_grad_ready(param)
return hook6.15 在 register_grad_ready 里进行 start_grad_sync
注意: DistributedOptimizer 对应这里的 reduce_scatter, 其实是
Zero1, 只是更新了一个bucket里自己对应的那部分的grad, 但总的 grad 还是那么大。
# Coalesce communication kernels across buckets in the bucket group.
with stream_context, _coalescing_manager(communication_group, async_ops=async_op) as cm:
for bucket in self.buckets:
if self.ddp_config.use_distributed_optimizer:
local_data_view = shard_buffer(
bucket.grad_data, self.intra_distributed_optimizer_instance_size
)[self.intra_distributed_optimizer_instance_rank]
dist_reduce_scatter_func(
local_data_view,
bucket.grad_data,
op=reduce_op,
group=communication_group,
async_op=async_op,
)
else:
torch.distributed.all_reduce(
bucket.grad_data, op=reduce_op, group=communication_group, async_op=async_op
)6.16 forward 时必须等带 weight的all_gather 结束
def _make_forward_pre_hook(self):
"""
Create a forward pre-hook to wait on all-gather handles when necessary (i.e.,
when a module uses a parameter in a bucket with a still incomplete all-gather).
"""
def hook(module, *unused):
assert (
self.use_forward_hook
), "Should use pre-hook only when overlap_param_gather is True"
# Make sure all parameters in this module have been all-gathered as necessary.
for param in module.parameters(recurse=False):
# Skip parameters without an associated buffer (such parameters have a
# .requires_grad field equal to False).
if param not in self.param_to_bucket_group:
continue
assert param.requires_grad
# If aligning param all-gather across pipeline stages, all-gather is dispatched
# by start_param_sync calls in core/pipeline_parallelism/schedules.py.
# If overlapping param all-gather with optimizer step, then all-gather has
# already been dispatched in optimizer step.
skip_next_bucket_dispatch = (
self.ddp_config.align_param_gather
or self.overlap_param_gather_with_optimizer_step
)
self.param_to_bucket_group[param].finish_param_sync(
skip_next_bucket_dispatch=skip_next_bucket_dispatch
)
return hook6.17 具体进行 all_gather 之处
通过DDP的前向钩子进行的,确定的,不是在DistributedOptimzier 里进行的。
def start_param_sync(self, force_sync: bool = False):
"""
Initiates all necessary param all-gathers for this bucket.
When ddp_config.overlap_param_gather is set to True, dispatches an asynchronous
communication call (unless force_sync is True). When ddp_config.overlap_param_gather
is set to False, makes synchronous call.
Args:
force_sync (bool, optional): force synchronous collective regardless of
other settings if true.
"""
assert self.ddp_config.use_distributed_optimizer
if force_sync:
if self.param_gather_handle is not None:
self.param_gather_handle.wait()
self.param_gather_handle = None
return
else:
assert self.param_gather_handle is None
async_op = self.ddp_config.overlap_param_gather and not force_sync
# Coalesce communication kernels across buckets in the bucket group.
with _coalescing_manager(
self.intra_distributed_optimizer_instance_group, async_ops=async_op
) as cm:
for bucket in self.buckets:
local_data_view = shard_buffer(
bucket.param_data, self.intra_distributed_optimizer_instance_size
)[self.intra_distributed_optimizer_instance_rank]
dist_all_gather_func(
bucket.param_data,
local_data_view,
group=self.intra_distributed_optimizer_instance_group,
async_op=async_op,
)
if async_op:
self.param_gather_handle = cm
else:
# When using `_coalescing_manager`, even if a synchronous op (async_op=False) is used,
# `cm` is not None, which is different from when `_coalescing_manager` is not used in
# which case the torch.distributed._all_gather_base() will return None. In order to
# maintain consistency with prior code, we need to manually set communication handle to
# None.
self.param_gather_handle = None
self.param_gather_dispatched = True7 DistributedOptimizer
7.1 DistributedOptimizer 的初始化
- 用每个model的buffers来初始化DistributedOptimizer;
optimizer = DistributedOptimizer(
*optimizer_args,
model_chunks=model_chunks,
per_model_buffers=per_model_buffers,
data_parallel_group=data_parallel_group,
data_parallel_group_gloo=data_parallel_group_gloo,
data_parallel_group_idx=data_parallel_group_idx,
)7.2 DistributedOptimzier 中额外clone 出 fp32 的 param
shard_main_param = shard_model_param.clone().float() # fp32的副本7.3 DistributedOptimzier 中 params 的更新
# Update optimizer's params.
if not config.use_precision_aware_optimizer:
group_range["orig_group"]["params"] = [
*shard_fp32_params_this_group,
*shard_fp32_from_float16_params_this_group,
]
else:
group_range["orig_group"]["params"] = [
*shard_fp32_params_this_group,
*shard_float16_params_this_group,
]7.4 MixedPrecisionOptimizer step 中完成参数转化和更新
- step1: self.prepare_grads() : 将 param.main_grad 切片到 shard_main_param.grad
- step2: 完成参数更新
- step3: 将shard_main_param 再copy 回 shard_model_param
@torch.no_grad()
def step(self):
timers = self.config.timers
found_inf_flag = self.prepare_grads()
if found_inf_flag:
return False, None, None
# Clip the main gradients.
if timers is not None:
timers('optimizer-clip-main-grad', log_level=1).start(
barrier=self.config.barrier_with_L1_time
)
grad_norm = 0.0
if self.config.clip_grad > 0.0:
grad_norm = self.clip_grad_norm(self.config.clip_grad)
if timers is not None:
timers('optimizer-clip-main-grad').stop()
# Count the zeros in the grads.
if timers is not None:
timers('optimizer-count-zeros', log_level=1).start(
barrier=self.config.barrier_with_L1_time
)
num_zeros_in_grad = self.count_zeros() if self.config.log_num_zeros_in_grad else 0
if timers is not None:
timers('optimizer-count-zeros').stop()
success = self.step_with_ready_grads()
# Successful update.
return success, grad_norm, num_zeros_in_grad7.5 梯度抽取到切片:
对model的属于当前进程的param的grad : model_param.main_grad 进行切片;
将切片后的grad进行copy到shard_main_groups中;
copy_group_grads 函数定义在_copy_model_grads_to_main_grads 函数内;
# Utility method for copying group grads.
def copy_group_grads(model_groups, shard_main_groups):
for model_group, shard_main_group in zip(model_groups, shard_main_groups):
for model_param, shard_main_param in zip(model_group, shard_main_group):
param_range_map = self._get_model_param_range_map(model_param)
param_range = param_range_map["param"]
assert param_range.size == shard_main_param.nelement()
model_grad = model_param.main_grad
shard_model_grad = model_grad.view(-1)[param_range.start : param_range.end]
if self.config.use_precision_aware_optimizer:
# Pytorch requires a param and its' grad to be the same dtype, but we want
# their types to be different in precision-aware optimizer. So we use
# ".decoupled_grad" to replace ".grad".
# Note that this requires corresponding modifications in the optimizer (Let
# the optimizer read gradients from ".decoupled_grad" instead of ".grad").
shard_main_param.decoupled_grad = shard_model_grad
else:
shard_main_param.grad = shard_model_grad.float()7.6 更新后的 param 再 copy 到 weight
@torch.no_grad()
def step_with_ready_grads(self) -> bool:
"""Step the optimizer with ready gradients, return successful."""
timers = self.config.timers
# Step the optimizer.
if timers is not None:
timers('optimizer-inner-step', log_level=1).start(
barrier=self.config.barrier_with_L1_time
)
if not self.is_stub_optimizer:
self.optimizer.step()
if timers is not None:
timers('optimizer-inner-step').stop()
# Update params from main params.
if timers is not None:
timers('optimizer-copy-main-to-model-params', log_level=1).start(
barrier=self.config.barrier_with_L1_time
)
if not self.is_stub_optimizer:
self._copy_main_params_to_model_params()
if timers is not None:
timers('optimizer-copy-main-to-model-params').stop()
return True# Utility method for copying group params.
def copy_group_params(shard_main_groups, model_groups):
for shard_main_group, model_group in zip(shard_main_groups, model_groups):
for shard_main_param, model_param in zip(shard_main_group, model_group):
param_range_map = self._get_model_param_range_map(model_param)
world_range = param_range_map["gbuf_world_in_bucket"]
assert world_range.size == shard_main_param.nelement()
gbuf_index, _, bucket_id = self.model_param_gbuf_map[model_param]
model_param_buffer = self.buffers[gbuf_index].buckets[bucket_id].param_data
shard_model_param = model_param_buffer.view(-1)[
world_range.start : world_range.end
]
if is_float8tensor(model_param):
# 1. When "--fp8-param-gather" is disabled, the main param is first cast to
# BF16/FP16, and then cast to FP8, so the amax_history is calculated
# using BF16/FP16 param.
# 2. When "--fp8-param-gather" is enabled, we can cast the FP32 main param
# to FP8 directly, which results in slightly different results with
# higher speed. In theory, this does not affect convergence.
# TODO: The following code maintains the logic of the point-1 above. It can
# be deleted if it is not necessary.
shard_main_param = shard_main_param.to(model_param.dtype)
quantize_param_fragment(
shard_main_param, out=shard_model_param, param=model_param
)
else:
shard_model_param.data.copy_(shard_main_param)
# When using precision-aware optimizer, main params are held by self.optimizer. It will also
# do the work of copying data from main params to model params.
if self.config.use_precision_aware_optimizer:
return